

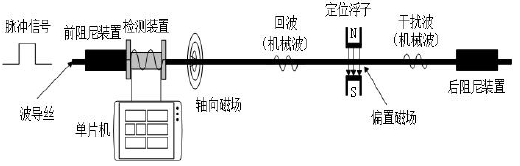
磁致伸缩液位传感器脉冲驱动电路发射出脉冲信号,通过放大电路将脉冲信号放大并且输入到波导丝上,波导丝与外部电路共同组成一个闭合回路。脉冲信号沿着波导丝向前传播,并在波导丝的周围形成一个轴向磁场,轴向磁场随着脉冲信号一起向前传播。当脉冲信号传到定位浮子所在的位置时,轴向磁场会与定位浮子所形成的偏置磁场相互叠加,进而行成一个螺旋磁场。根据魏德曼效应可知,螺旋磁场会对波导丝施加力的作用,使波导丝产生形变,因此波导丝会在定位浮子位置产生机械波。机械波会沿着波导丝向两端传播,由定位浮子位置向检测装置传播的机械波称为回波;由定位浮子位置向波导丝末端传播的机械波称为干扰波。回波沿着波导丝向检测装置传播,根据维拉里效应可知,波导丝在发生形变时其内部磁场也会发生变化,因此当机械波传到检测装置位置时,会引起该位置的波导丝磁场发生变化,被检测装置检测到,检测装置内部是一个线圈,当线圈中的磁通量发生变化时,根据法拉第电磁感应定律可知线圈中会产生电流,通过检测装置就能将磁信号转化成电信号输入到后期电路中进行处理。
磁致伸缩液位传感器的工作原理如图所示:
脉冲信号发出的时间为t0 ,检测装置检测到回波信号的时间为t1 ,用 v 表示回波的传播速度:
v = / G/P
式中 v—回波在波导丝中的传播速度;
G—波导丝的剪切弹性模量;
ρ —波导丝的密度。
磁致伸缩液位传感器脉冲信号在波导丝中传播的速度接近光速,机械波在波导丝中的传播速度远远小于光速,可以忽略脉冲信号在波导丝中的传播时间,只利用机械波的传播速度进行计算。
脉冲信号发出与回波信号接收到的时间差为(t1−t0),因此可以得出浮子与检测装置之间的距离 l:
l = (t1−t0)v
式中 l—浮子与检测装置之间的距离;
t1—检测到回波信号的时间;
t0—脉冲信号发出的时间。
通过公式求出的磁致伸缩液位传感器定位浮子所在的位置就是当前的容器中液面的位置。
 微信扫一扫
微信扫一扫
